
资讯中心NEWS CENTER
在发展中求生存,不断完善,以良好信誉和科学的管理促进企业迅速发展机器人焊钳是一种自动化焊接设备,与其他焊接设备相比,它具有以下区别和优势:1.自动化程度高:机器人焊钳可以实现全自动化焊接,无需人工干预,很大程度提高了生产效率和焊接质量。2.精度高:机器人焊钳采用数字化控制系统,能够精确控制焊接位置和焊接速度,保证焊接质量。3.灵活性强:机器人焊钳可以根据不同的焊接任务进行编程,适应不同的焊接需求,具有较强的灵活性。4.安全性高:机器人焊钳可以在危险环境下进行焊接,避免了人工焊接的安全隐患。5.成本低:机器人焊钳可以实现长时间连续焊接,减少了人工成本和生产成本,降低了企业的生产成本。综上所述,机器人焊钳具有自动化程度高、精度高、灵活性强、安全性高和成本低等优势,是现代焊接生产中不可或缺的设备。机器人焊钳可以适用于各种不同的焊接材料和焊接方式,具有广泛的应用领域。上海双机器人机器人焊钳设备
机器人焊钳在使用过程中需要注意以下安全问题:1.机器人操作区域应该有明确的标识,禁止未经授权的人员进入。2.操作人员应该接受专业的培训,了解机器人的操作方法和安全规范。3.机器人应该安装在稳定的基础上,避免机器人在操作过程中发生倾斜或移动。4.机器人应该配备安全装置,如安全光幕、安全门等,以保证操作人员的安全。5.在操作机器人时,应该戴上防护手套、护目镜等个人防护装备,以避免受到火花、烟尘等伤害。6.机器人的电源应该随时关闭,以避免电击等安全事故。7.在机器人操作过程中,应该随时检查机器人的状态,如电源、传感器等,确保机器人正常运行。8.在机器人操作过程中,应该避免与机器人的工作区域接触,以避免受到机器人的碰撞或夹伤。9.在机器人操作过程中,应该避免机器人与其他设备或人员发生碰撞,以避免安全事故的发生。10.在机器人操作过程中,应该随时注意机器人的工作状态,如温度、电流等,以避免机器人发生故障或损坏。陕西国产机器人焊钳工厂机器人焊钳的使用能够提高生产线的稳定性和连续性,减少生产中断。

机器人焊钳在焊接过程中,要保证熔池的稳定性,需要注意以下几点:1.控制焊接电流和电压:焊接电流和电压是影响熔池稳定性的重要因素。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接电流和电压,以保证熔池的稳定性。2.控制焊接速度:焊接速度也是影响熔池稳定性的重要因素。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接速度,以保证熔池的稳定性。3.控制焊接角度:焊接角度也会影响熔池的稳定性。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接角度,以保证熔池的稳定性。4.控制焊接气体流量:焊接气体流量也是影响熔池稳定性的重要因素。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接气体流量,以保证熔池的稳定性。5.检查焊接设备和焊接材料:机器人焊钳需要定期检查焊接设备和焊接材料的质量,以保证焊接质量和熔池的稳定性。
机器人焊钳可以通过多种方式适应不同的工作环境和任务。首先,机器人焊钳可以根据不同的工件形状和大小进行编程,以适应不同的焊接任务。其次,机器人焊钳可以通过使用不同的焊接工艺和焊接材料来适应不同的工作环境和任务。例如,对于高温环境下的焊接任务,可以使用特殊的耐高温焊接材料,以确保焊接质量和安全性。此外,机器人焊钳还可以通过使用不同的夹具和工具来适应不同的工作环境和任务。例如,在焊接大型工件时,可以使用特殊的夹具来固定工件,以确保焊接质量和安全性。除此之外,机器人焊钳还可以通过使用传感器和视觉系统来适应不同的工作环境和任务。例如,在焊接复杂形状的工件时,可以使用视觉系统来检测工件的形状和位置,以确保焊接质量和精度。总之,机器人焊钳可以通过多种方式适应不同的工作环境和任务,以提高生产效率和质量。机器人焊钳的使用可以提高企业的竞争力和市场占有率。

机器人焊钳在焊接过程中,材料变形是一个常见的问题。这是因为焊接时会产生高温,导致材料膨胀和收缩,从而导致变形。为了防止材料变形,可以采取以下措施:1.控制焊接温度:通过控制焊接温度,可以减少材料的膨胀和收缩。可以使用低温焊接或者采用预热的方法来控制焊接温度。2.采用适当的焊接技术:不同的焊接技术对材料的变形影响不同。选择适当的焊接技术可以减少材料的变形。例如,采用点焊或者激光焊接可以减少材料的变形。3.采用适当的焊接参数:焊接参数的选择对材料的变形也有很大的影响。选择适当的焊接参数可以减少材料的变形。例如,选择适当的焊接速度和焊接电流可以减少材料的变形。4.采用适当的夹具:夹具的选择对材料的变形也有很大的影响。选择适当的夹具可以减少材料的变形。例如,采用弹性夹具可以减少材料的变形。总之,机器人焊钳在焊接过程中,通过控制焊接温度、选择适当的焊接技术和参数、以及选择适当的夹具,可以有效地防止材料的变形。机器人焊钳的操作过程中能够实现自动化的质量检测和排除不良品,提高产品质量。陕西国产机器人焊钳工厂
机器人焊钳能够实现多种焊接方式,包括点焊、拖焊、搭接焊等。上海双机器人机器人焊钳设备
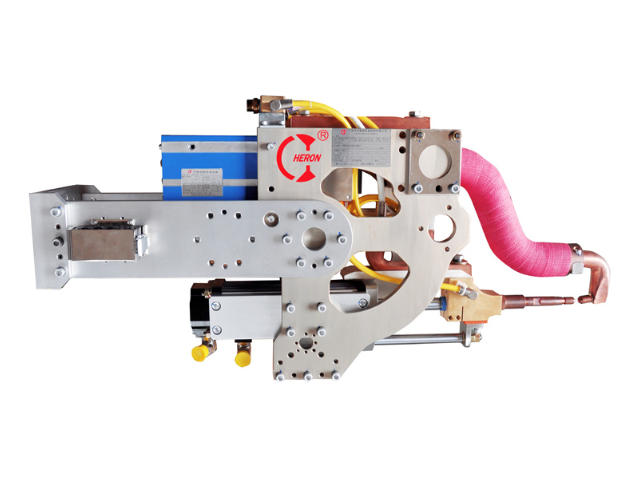
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包括程序和算法。控制系统可以实现机器人的运动控制、焊接参数的控制和监测等功能。2.机械结构:机器人焊钳的机械结构包括机械臂、焊钳、传动系统等,机械臂可以实现多自由度的运动,焊钳可以实现焊接操作,传动系统可以将电机的转动转化为机械臂的运动。3.传感器:机器人焊钳的传感器可以感知焊接过程中的温度、电流、电压等参数,通过传感器的反馈,控制系统可以实时调整焊接参数,保证焊接质量。4.焊接参数:机器人焊钳的焊接参数包括焊接电流、电压、速度、焊接时间等,这些参数可以根据焊接材料和焊接要求进行调整,以保证焊接质量。综上所述,机器人焊钳的工作原理是通过控制系统控制机器人的运动和焊接参数,实现焊接的自动化。机器人焊钳具有高效、精确、稳定的特点,可以提高焊接效率和质量。上海双机器人机器人焊钳设备



